PRODUCT SMART UQ
エミュレーション(予測モデリング)
SmartUQの画期的なガウス過程回帰を主としたエミュレーションアルゴリズムは、エミュレータをビッグデータや高次元のシステムに適合させるための障壁を取り除き、不確かさの定量化と解析の利用に新たな可能性をもたらします。SmartUQ社の特許出願中の技術は、連続入力と離散入力を容易に扱い、単変量、多変量だけでなく、空間依存、時系列解析や周波数依存など関数出力を持つガウス過程回帰エミュレータを簡単に構築することができます。これらの一連の作業はすべて一瞬で行われます。
エミュレーション(予測モデル)とは
SmartUQ でのエミュレータは別名で予測モデルまたは数値シミュレーションを実行するために使用される代替モデルとしてサロゲートモデルと呼ばれることもあります。つまりエミュレータとは、複雑な物理的システムやシミュレーションされたシステムの出力を、一連の入力に対して模倣する統計的な確率モデルのことです。正確な高速エミュレータを構築することは、解析や不確かさの定量化を行う上で重要なステップとなります。シミュレーションや物理的なテストからエミュレータに移行することで、システム評価の速度が飛躍的に向上し、それに伴うコストも削減されるため、従来であれば時間やコストがかかりすぎていた多くのタスクを実行できるようになります。
ジェットエンジンのシミュレーションやテストなど、システムの規模が大きく複雑であればあるほど、エミュレーションから得られるメリットは大きくなります。統計的エミュレータは多くの課題で有望視されていますが、大規模な問題や高次元の問題に適用した場合、深刻な数値的問題に遭遇します。そのため、大規模で複雑なデータセットを用いてエミュレータを構築することは、解析や不確かさの定量化において重要なボトルネックであると広く考えられています。
SmartUQの予測モデリングでは、連続値だけでなく、離散値やカテゴリ値などの入力や、大量の入力パラメータ、機能的/過渡応答、空間依存での応答予測、高忠実度のデータの低次元化、および非常に大きなサンプルサイズの予測も含む、幅広いシナリオをカバーしています。クリギングを使用した確率論的な空間予測空間および時間的に分散したデータを予測できるSmartUQの機能により、数値シミュレーションや試作モデルの評価結果を表すデータを補完して大規模な空間の中で予測することが可能です。また、SmartUQ はガウス過程回帰やカーネル法、ニュートラルネットワークやディープラーニング、加算モデル、ペナルティ付き回帰、応答曲面モデルなど、高度な予測解析や機械学習アルゴリズムの柔軟なセットを提供しています。
ガウス過程回帰での大規模エミュレーション
SmartUQは、ビッグデータや多次元のデータセットのための画期的なエミュレーション技術を持っています。SmartUQの正確なエミュレーション技術は、複雑なシステムの入力から出力までの空間全体を素早くマッピングすることができます。標準的なノートPCで、1,000点のエミュレータを数秒で、4,000点のエミュレータを数分で構築することができます。従来の方法では、同じデータセットに対してエミュレータを構築するのに数時間から数日かかることもありました。
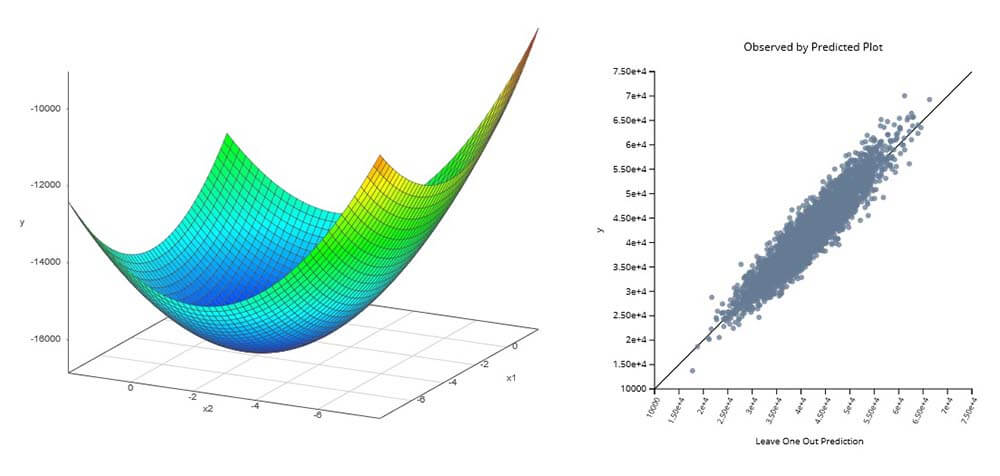
大規模エミュレーション
この例では、75の入力変数をカバーする4,000の実験ポイントのデータセットを使用してエミュレータを構築しました。SmartUQのアルゴリズムは、このエミュレータを標準的なノートPCにフィットさせるのに5分もかかりませんでした。交差検証のグラフからわかるように、すべての出力ポイントが対角線に近く、正確なエミュレータであることがわかります。
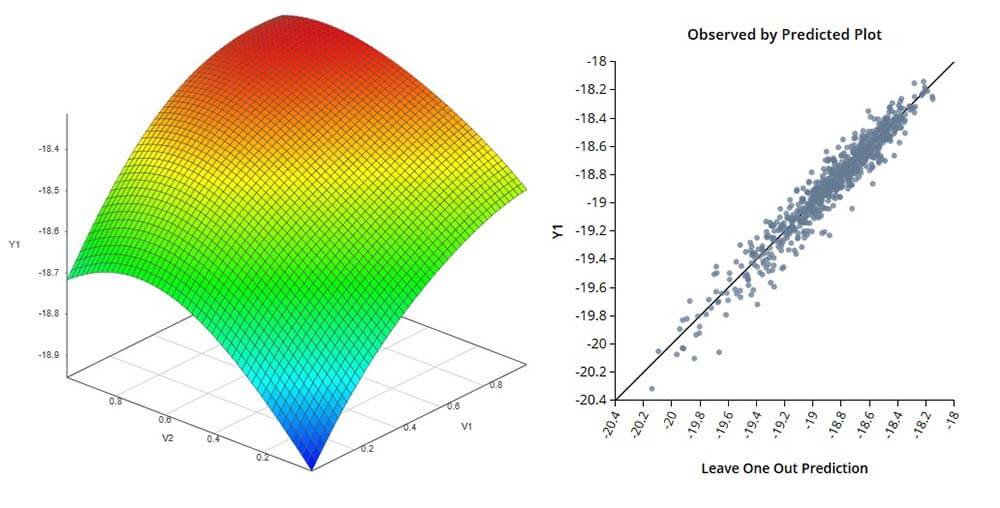
多変量応答エミュレーション
多変量応答エミュレータは、自動車のシミュレーションやテストのように、多数の連続した入力と複数の出力を持つシステムに効率的です。効率が上がるということは、ユーザーが異なる出力と入力の関係を個別にではなく同時に探り、理解することができるということであり、プロセス全体をこれまで以上に高速化することができます。
ここに示すエミュレーターは、10個の入力変数と3個の出力変数を持つ750ポイントのデータセットに適合するように構築されています。SmartUQは、一般的なラップトップでこのエミュレーターを構築するのに8秒もかかりませんでした。
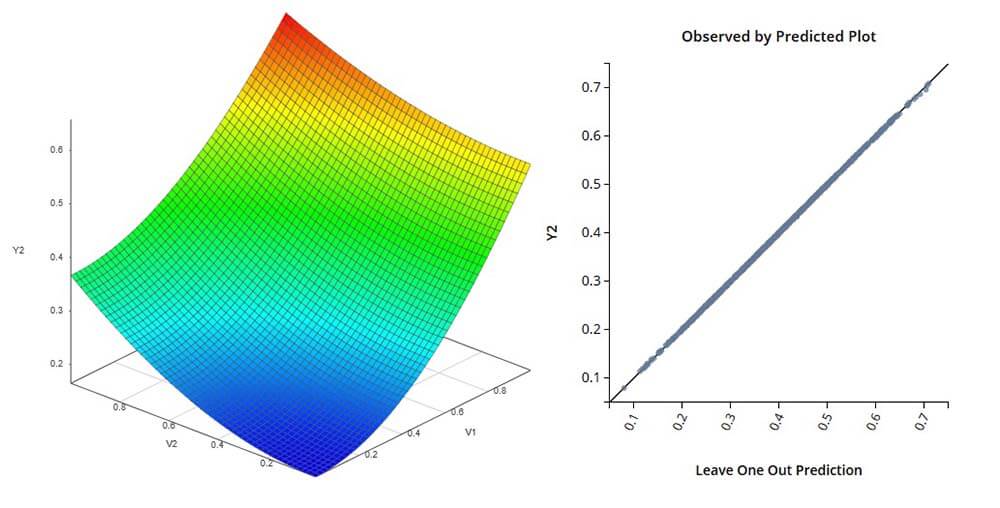
多変量応答エミュレーションの例2
上のグラフは、入力V1およびV2に対する出力Y2の予測される応答を示しています。予測値が対角線上にあることから、エミュレータがこの出力の重要な動作をすべて捕捉していることがわかります。
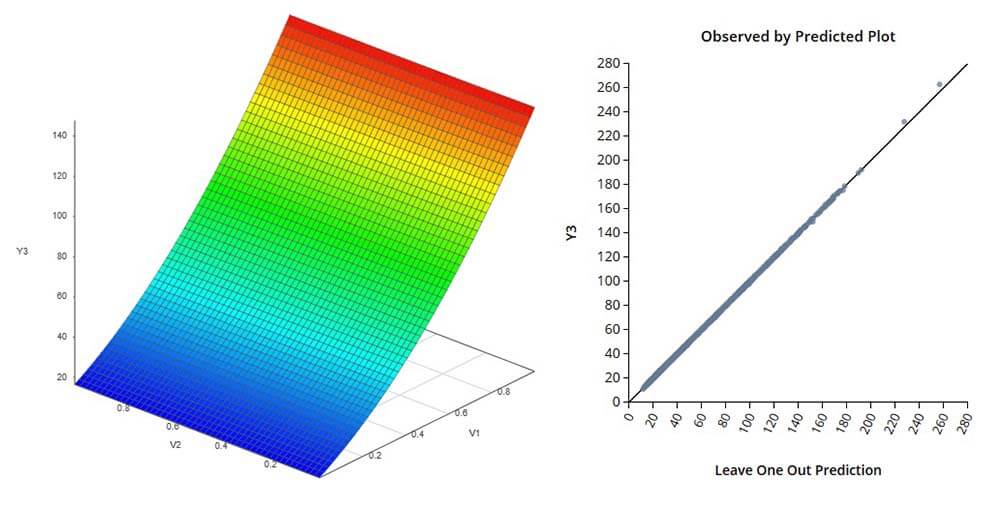
多変量応答エミュレーションの例3
上のグラフは、入力V1およびV2に対する出力Y3の予測応答を示しています。予測値が対角線上にあることから、エミュレータがこの出力の重要な動作をすべて捕捉していることがわかります。
カテゴリ値を伴うガウス過程回帰での混合入力エミュレーション
混合入力エミュレータは、連続入力と離散入力の両方を持つシステムを扱う場合に便利です。離散的な入力には、固定されたコンポーネントのセットや、まったく異なるタイプの機器やサブシステムを含むシミュレーションなどがあります。混合入力のエミュレーションを使用すると、異なる設計のエミュレータを構築し、より少ない労力で解析することができます。より多くの選択肢を一度に検討することで、より良い設計を行うことができます。 航空機エンジンのシミュレーションにおける離散変数の例としては、複数の異なるソルバーの使用、タービンブレードの複数の離散的なサイズと形状、複数の異なるタイプのタービン/コンプレッサーのトランスミッションなどがあります。 混合入力問題の例としては,水の流量などの連続的な入力と,放射性物質の種類(汚染された機器,燃料棒,ガラス化した使用済み燃料など)のような離散的な入力を含む放射線漏洩モデルがあります。
この例は、6つの連続入力と5つのレベルを持つ1つの離散入力を持つ一変量応答混合入力エミュレータを使用して作成されました。SmartUQは、一般的なノートPCで500点のデータセットからエミュレータを構築するのに9秒もかかりませんでした。
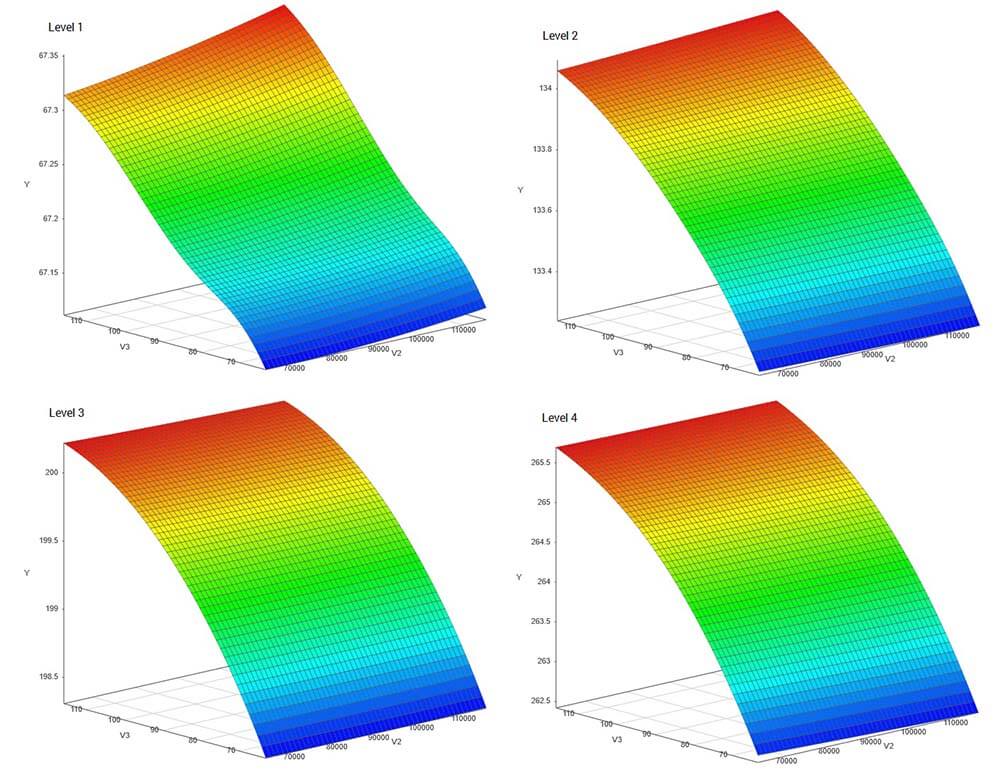
混合入力エミュレーション:複数レベル
上のグラフは、離散的な入力の最初の4レベルについて、入力V2およびV3に対する出力Yの予測応答を示しています。
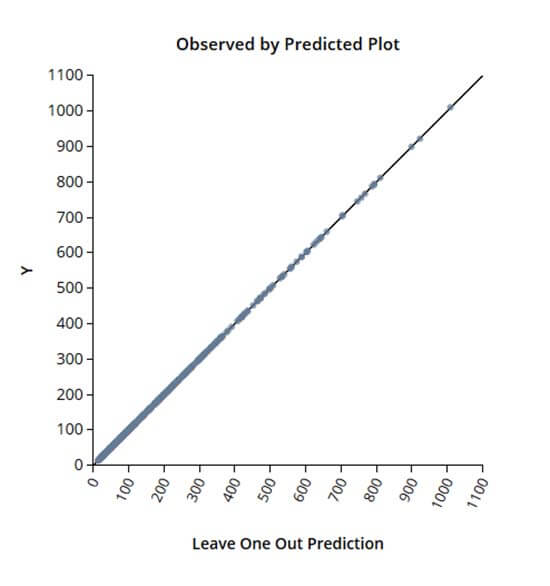
混合入力エミュレーション:Leave One Out法での比較
このグラフは、データセット内のすべてのポイントの交差検証(CV)エラーを示しています。すべてのポイントが対角線に非常に近い位置にあり、エミュレータがデータセットの関連するすべての動作を捕捉していることがわかります。
関数依存および過渡応答エミュレーション
任意の関数あるいは過渡的な出力を伴うシミュレーションは、あらゆる工学分野で利用されています。関数応答エミュレータには、時間や距離など、少なくとも1つの関数入力変数が含まれています、シミュレーションを実行するたびに、関数入力の値のセットに対応する値が出力されます。 例えば、表面抗力を計算する翼型シミュレーションを考えてみましょう。このシミュレーションでは、翼の長さに沿った時間と距離という2つの関数的な入力変数に加えて、平均風速、表面コーティングの種類、翼断面の幾何学的パラメータなどの多数の入力変数が使用されます。各シミュレーションは、非関数、つまり入力変数のセットで実行されます。例えば1回のシミュレーションでは、表面コーティングの種類と形状は1つだけです。出力である表面抗力は、各時間ステップ、つまり設定した関数ステップ(例えば0.1秒ごと)で、翼の長さに沿った各位置について計算され,各シミュレーションでは、関数からの入力変数に対する出力変数の結果が得られます。このように、表面コーティングと形状の各入力セットは、翼の長さとシミュレーションの期間における抗力の結果に関連付けられています。
効率的な関数応答型エミュレーション
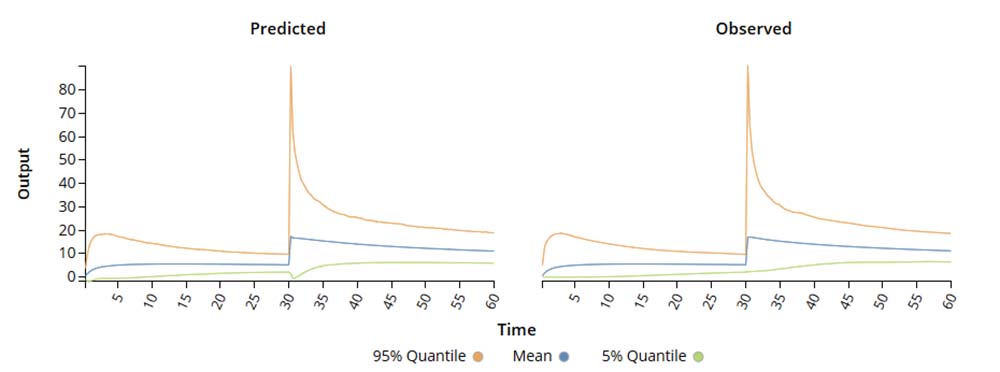
過渡応答エミュレータのプロファイル比較
この例では、大規模な過渡応答のデータセットについて、測定値と生成されたエミュレータとの対応を示しています。